
Authors
Evis Plaku; Arben Çela; Erion Plaku – IEEE Access (Q1)
Imagjinoni një robot që duhet të navigojë në një magazinë të madhe, një spital të zhurmshëm, ose një mjedis urban të mbushur me pengesa. Sisteme të tilla sot përdoren gjithnjë e më shumë, por shumica e tyre planifikojnë vetëm një rrugë të vetme nga pika A në pikën B. Kjo funksionon mirë… derisa diçka shkon keq.
Nëse rruga bllokohet nga një pengesë e papritur, nëse kushtet ndryshojnë gjatë ekzekutimit, ose nëse sistemi duhet të zgjedhë rrugën më të mirë bazuar në prioritete të ndryshme, një plan i vetëm nuk mjafton.
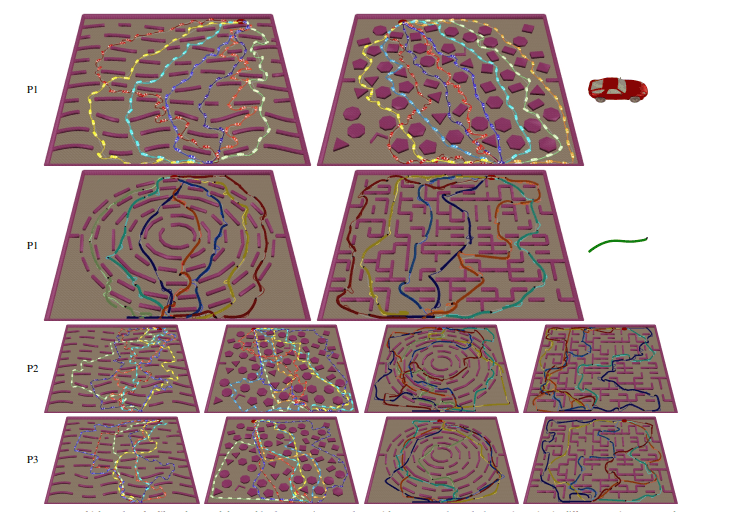
Punimi ynë, i publikuar në IEEE Access (Q1), adreson pikërisht këtë sfidë. Kemi zhvilluar një framework që gjeneron automatikisht shumë trajektore të ndryshme, të sigurta dhe fizikisht të realizueshme për robotë që navigojnë në mjedise komplekse, duke siguruar që secila rrugë kalon nëpër zona të ndryshme të hapësirës dhe jo të njëjtën.
Si funksionon?
Sistemi punon në dy faza. Në fazën e parë, ndërtohet një hartë e lidhshmërisë së hapësirës së lirë, dhe mbi të kryhet një kërkim inteligjent që penalizon gradualisht zonat tashmë të eksploruara, duke detyruar kërkimet pasuese të gjejnë rrugë gjithnjë e më të ndryshme. Në fazën e dytë, çdo rrugë gjeometrike shndërrohet në një trajektore të plotë, duke respektuar dinamikën reale të lëvizjes së robotit dhe duke shmangur çdo pengesë në çdo hap.
Pse është e rëndësishme?
Rezultati final është një set trajektoresh që mbulojnë zona të ndryshme të hapësirës, duke i dhënë sistemit fleksibilitet të vërtetë. Nëse një rrugë bllokohet, alternativat janë gati. Nëse operatori njerëzor duhet të zgjedhë, ka opsione konkrete dhe të ndryshme para tij.
Metoda është testuar me dy modele robotike eksperimentale në mjedise me kompleksitet të lartë, duke e krahasuar me pesë metoda alternative. Rezultatet tregojnë performancë superiore si në diversitetin e trajektoreve, ashtu edhe në shpejtësinë e llogaritjes.
Aplikacionet kryesore përfshijnë:
Navigimin autonom në magazina dhe ambiente industriale, robotat asistentë në spitale dhe hapësira të ngushta, planifikimin e rrugëve alternative për automjete autonome, koordinimin e flotave të robotave që ndajnë të njëjtin hapësirë, si dhe sistemet ku operatori njerëzor zgjedh ndërmjet disa opsioneve të vlefshme.
Ky punim është fryt i bashkëpunimit ndërmjet kërkuesve shkencorë në Universitetin Metropolitan Tirana, ESIEE Paris – Université Gustave Eiffel, dhe U.S. National Science Foundation.
Lexoni artikullin e plotë këtu: https://ieeexplore.ieee.org/document/11506360



