
Authors
Evis Plaku; Arben Çela; Erion Plaku – IEEE Access (Q1)
Imagine a robot navigating a large warehouse, a busy hospital, or a complex urban environment filled with obstacles. Although autonomous systems are increasingly deployed in such settings, most of them still rely on planning a single path from point A to point B. This approach performs adequately under normal conditions; however, it becomes insufficient when unexpected changes occur.
When a path is suddenly blocked, when environmental conditions change during execution, or when the system must select the most suitable route based on different criteria, a single planned trajectory is no longer adequate.
Our work, published in IEEE Access (Q1), addresses this limitation by proposing a framework that automatically generates multiple diverse, safe, and physically feasible trajectories for robots operating in complex environments. The proposed approach ensures that each trajectory explores different regions of the configuration space rather than converging to similar solutions.
Methodology
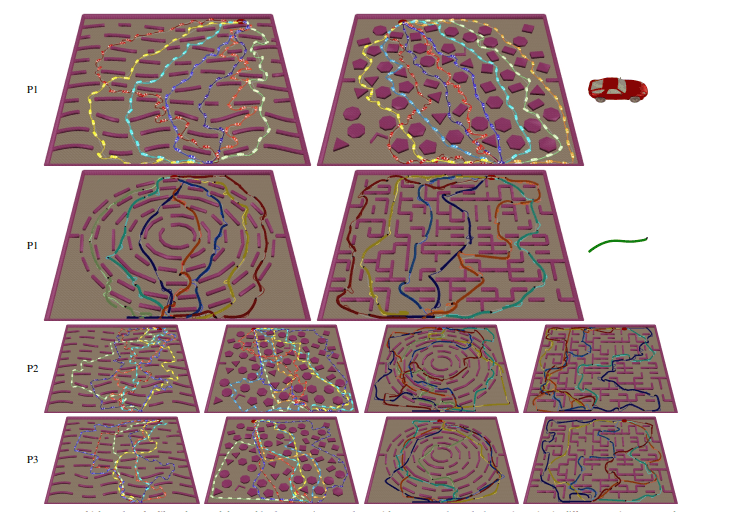
The proposed system operates in two main stages. First, a connectivity roadmap of the free space is constructed, upon which an informed search is performed. This search progressively penalizes already explored regions, thereby encouraging the discovery of increasingly diverse paths. In the second stage, the resulting geometric paths are transformed into dynamically feasible trajectories that respect the robot’s kinematic and dynamic constraints while ensuring continuous obstacle avoidance.
Significance
The resulting set of trajectories provides meaningful environmental coverage and enhances system flexibility. If one trajectory becomes infeasible due to dynamic obstacles, alternative solutions are readily available. Furthermore, when human intervention is required, the system provides multiple valid and diverse options for decision-making. The proposed method has been evaluated on two robotic platforms in highly complex environments and compared against five state-of-the-art approaches. Experimental results demonstrate superior performance in terms of trajectory diversity and computational efficiency.
Applications
The proposed framework is applicable to a wide range of domains, including autonomous navigation in warehouses and industrial environments, assistive robotics in healthcare facilities, alternative route planning for autonomous vehicles, coordination of multi-robot systems operating in shared spaces, and decision-support systems where multiple feasible solutions are required. This work is the result of a collaborative effort between researchers from the University Metropolitan Tirana, ESIEE Paris – Université Gustave Eiffel, and the U.S. National Science Foundation.
Full article: https://ieeexplore.ieee.org/document/11506360



